PSB601EN Coursework 1 Brief
Module Title: CU T126 PSB601EN Systems Operation And Control Project Pt
CW1: Critical Analysis And Planning Of A Mechatronic/Robotic Engineering Solution
Word Count: ~1300
1. Chapter 1: Introduction
1.1 Background of the Project
Robotic arms utilize servo powered actuation controlled through inputs from joysticks. Systems like these operate primarily in an open-loop control, where the input command is sent without verifying the actual output position. This presents limitations in accuracy, mechanical drift, with poor repeatability under conditions of varying load factors.
The project proposal is to introduce closed-loop control using feedback sensing, enabling the system to continuously monitor joint position and correct deviations, thus creating a negative feedback control system.
1.2 Problem Statement
The current joint control of the robotic arm lacks external feedback, resulting in positioning inaccuracies, sensitivity to disturbances and the inability to execute precise actions. Retrofitting a single joint with a feedback control system will improve performance and meet engineering control requirements.
1.3 Aim
To design and implement a single joint closed loop PID control system for a robotic arm to improve positioning accuracy and dynamic performance.
1.4 Objectives
The objective of this project is to develop a closed loop control system using an external position sensor, to model and simulate the system using MATLAB/Simulink, and thus to evaluate system performance through testing and comparison with open loop control systems.
1.5 Scope/Limitations
The scope and limitations of the project will be that only one joint of the robotic arm will be studied, with no or limited modifications to the arm’s structure. This will be limited to PID control strategy and hardware validation may be constrained by the availability of components.
1.6 Summary
This chapter outlines the need for improvement in robotic arm control, and how it can be achieved though feedback systems. It defines the project’s aim, objectives and boundaries.
2. Literature Review
2.1 General Topic: Closed-Loop Control in Robotic Systems
Closed loop control systems incorporating negative feedback are a fundamental part of modern robotics, enabling systems to achieve accurate, stable and robust performance though continuous feedback. Unlike open loop systems, closed loop systems compare actual output versus desired and impose corrections on deviations in real time. This aligns with control theory principles, where negative feedback improves system stability and reduces errors.
Robotic manipulators rely on feedback from sensors such as potentiometers or encoders to achieve precise motion control. According to Craig (2005), accurate joint positioning is essential for reliable robotic operation, particularly in applications requiring repeatability and precision.
2.2 Related Study on Control Methodology (PID Control)
PID controller is a widely used feedback mechanism in industrial automation, where it calculates an “error” value, which is the difference between a desired outcome and a measured process variable, and applies corrections based on Proportional, Integral and Derivative terms to minimize this error.
Proportional (P), Present: Produces an output value proportional to the current error. If the error is large, the correction is large. The action is akin to a spring, but alone, it cannot reach the exact target, often resulting in oscillation.
Integral (I) – Past: Acts on the accumulation of past errors over time. If the output hasn’t reached the target, the integral component builds up and forces the system to zero the remaining error (steady state error).
Derivative (D) – Future: Calculates the rate of change of the error. It acts as a damper, predicting future errors by slowing down the correction as it approaches the setpoint, preventing overshooting and oscillations.
Åström and Hägglund (2006) highlight that PID controllers are suitable for systems with relatively simple dynamics, such as servo-driven joints, and can achieve optimal performance when properly tuned.
For robotic arms, PID controllers are often implemented in discrete form using microcontrollers such as Arduino. The effectiveness of PID control depends heavily on system modelling and parameter tuning, involving simulation and validation
2.3 Related Studies on Application (Robotic Joint Control Systems)
Existing Systems: Open-Loop Servo Control Systems
Simple robotic systems commonly use open-loop control, where servo commands are issued without verifying the actual position. These systems are simple and low-cost but suffer from position drift, poor disturbance rejection such as from varying load factors, and a lack of precision
According to Corke (2011), such systems are unsuitable for applications requiring high accuracy or dynamic performance.
Potentiometer based feedback systems are widely used in low-cost robotics. They provide directly an analog measurement of joint position and have simple integration with microcontrollers. Bolton (2015) states that potentiometers are commonly used in position sensing applications due to their low cost and ease of integration. However, they introduce noise and signal drift, have limited resolution and will suffer from mechanical wear over time. These limitations reduce long term reliability and accuracy.
Modern robotic systems use magnetic or optical encoders due to the properties of having high resolution, up to 12–16 bit, non-contact sensing and improved reliability.
Research by Siciliano et al. (2010) shows that encoder feedback significantly enhances system performance in terms of precision and repeatability but comes at a higher cost and requires more complex integration.
| Criteria | Open-Loop System | Potentiometer System (Proposed) | Encoder-Based System |
| Feedback | None | Analog | Digital |
| Accuracy | Low | Medium | High |
| Noise Sensitivity | High | Medium | Low |
| Complexity | Low | Medium | High |
| Cost | Low | Low | High |
Thus, the advantages of the proposed Potentiometer system are that it is low cost and utilizes readily available components, enables simple integration with Arduino analog input and provides
sufficient accuracy for educational and prototype systems, while meeting requirement for negative feedback control.
It’s disadvantages are that the system is susceptible to signal noise, has limited resolution compared to encoders, and will experience mechanical wear over time.
2.3 Summary
Thus, the literature indicates that while encoder systems provide the highest accuracy, potentiometer systems offer a balance between performance, cost, and implementation complexity.
For this project, the potentiometer system is selected because it meets the learning objectives of modelling and control, enables implementation of a closed loop PID system at the same time reducing integration complexity while maintaining sufficient performance.
3. Project Management & Programme
3.1 Project Schedule
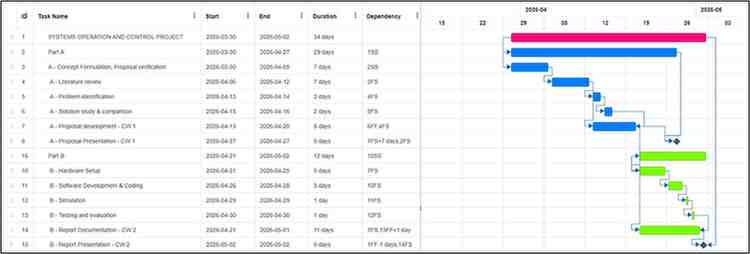
Gantt Chart Explanation
Part A focuses on the project proposal and planning (CW1), while Part B focuses on implementation and evaluation (CW2). With the expectation that approval in principle is given for Part A, execution for Part B will commence before formal presentation of Part B due to the expedited timeframe of the project. Project documentation (CW2) will be executed in concurrence with implementation.
3.2 Electrical Safety and Risk Assessment
| Work Activity | Hazard | Risk | Mitigation |
| Servo operation | Overcurrent | Component damage | Use regulated supply |
| Wiring | Short circuit | Fire risk | Proper insulation |
| Moving joint | Pinch hazard | Injury | Limit movement |
| Potentiometer mounting | Misalignment | Wrong readings | Secure coupling |
4. Project Proposal and Progress
4.1 Introduction and SDG Relevance
The project contributes to:
SDG 9: Industry, Innovation and Infrastructure
SDG 8: Decent Work and Economic Growth
By improving robotic control, this enhances automation efficiency and engineering innovation.
4.2 Proposed Design Concept
The design concept Flowchart is as follows:
Setpoint > Error > PID > Servo > Joint > Potentiometer > Feedback > Error
4.3 System Block Diagram

4.4 Technical Specifications
| Parameter | Value |
| Sensor | Rotary potentiometer |
| Output | 0–5 V |
| Controller | Arduino |
| Control method | PID |
| Sampling rate | ~100 Hz |
4.5 Bill of Materials (BOM)
| Component | Quantity |
| Arduino | 1 |
| Potentiometer (10 kΩ) | 1 |
| Servo motor | 1 |
| Breadboard | 1 |
| Jumper wires | Set |
| Power supply | 1 |
| Mounting bracket | 1 |
4.6 Software / Programming Environment
- Arduino IDE
- MATLAB/Simulink
- Serial data logging
4.7 Progress Status
- Planning: Completed
- Design: Completed
- Implementation: In progress
- Status: On track (positive progression)
4.8 Summary
The proposed system demonstrates feasibility and alignment with academic requirements for implementation and evaluation.
5. Conclusion
The project proposes a potentiometer based closed loop control system that improves the performance of a robotic arm.
The expected outcomes are that steady state errors are reduced, with improvements in response time and increased repeatability of motion.
The project fulfils the following academic requires:
CW1 requirements (analysis and planning)
CW2 requirements (implementation and evaluation)
Order Custom-Written PSB601EN Systems Operation and Control Project PT Coursework 1 Answer
Native Singapore Writers Team
- 100% Plagiarism-Free Essay
- Highest Satisfaction Rate
- Free Revision
- On-Time Delivery