| University | Singapore Institute of Technology (SIT) |
| Subject | MME2151: Control of Dynamic Systems |
Problem Statement
A model of a laboratory gantry crane.
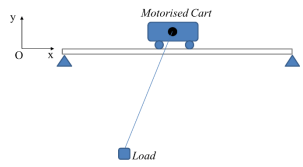
The cart is driven by a motor driving the two rear wheels and the four wheels ride on two parallel rails. The load is suspended by a cable, assumed taut during the motion.
The model of the motor producing the torque to drive the wheel resulting in a traction force F(s) (assuming no slip of the wheels on the rail) to drive the cart is given as follows:
![]()
J: total equivalent inertia of wheels, gears, and motor rotor (assuming damping B≈0)
Km: motor gain
m: motor time constant
r: radius of the wheel
V(s): input voltage to the motor
The time constant of motor, m = 1/2.4 sec
![]()
The equations of motion (linearized) are for the cart and the load for small are respectively
(𝑀 + 𝑚)𝑥̈= 𝑓 − 𝑚𝑙𝜃̈
𝑙𝜃̈= −𝑥̈− 𝑔𝜃
Crane-load system:
• M = 5 kg, mass of cart / trolley
• m = 0.2 kg, mass of load
• l = 0.82 m, length of cable
• g = 9.81 m/s2,acceleration due to gravity
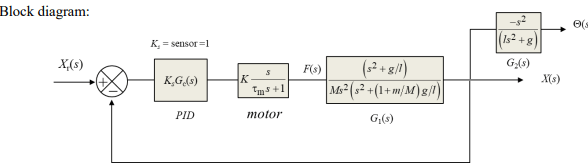
Using block diagrams and transfer functions, model the cart-load system. Develop the respective transfer functions for the motor, the pulley and the crane-load dynamics. Design a PID controller Gc(s) to move the crane a displacement x from an arbitrary reference O-XY.
Project requirement
Block diagram
(a) Use the signal builder in Part 1 to design the desired displacement Xr = 2 m. The cart as in Part 1 is to move forward, rest and then return in the given time intervals.
(b) Design the PID controller Gc(s). The PID controller should be designed such that X → Xr in the specified time. You may use the auto-tune to get a set of PID gains.
(c) Next, experiment with these gains, starting with the auto-tuned PID values, and varying each one at the time, starting with the tuned P term, with the other terms set at 0. Then keeping the P at the tuned value, vary the I-term and then the D-term. Discuss the effect of the P-, the I- and D-term
on the tracking of X → Xr within the specified time. Briefly indicate the effect also on the resulting angle of oscillations of the load, which is not controlled.
Report
You have already formed your own groups. Each group will submit a report. The report shall contain
• The transfer functions of the linearized cart and load dynamics
• The Simulink model as shown above.
• Relevant simulation results with explanation and the controller.
Stuck with a lot of homework assignments and feeling stressed ? Take professional academic assistance & Get 100% Plagiarism free papers
Employ genuine assignment support resources if you're having trouble with your (MME2151) Control of Dynamic Systems Assignment writing. We are a supreme global assignment help provider agency in Singapore. Our experts offer high-quality engineering assignments help to SIT university students. Executives will also assist you in obtaining a higher grade in each assignment at a reasonable cost.
Looking for Plagiarism free Answers for your college/ university Assignments.
- MNGT3012 Business Strategy Assignment Brief 2026 | The University of Newcastle
- MGT577 AI Concepts and Applications for Business Leaders End-of-Course Assessment 2026
- MGT564 Managing Digital Transformation in Operations End-of-Course Assessment 2026
- Organic Chemistry Homework Question 2026 | Nanyang Technological University
- BUS105 Statistics Assignment Tutor-Marked Assignment Questions 2026 | SUSS
- MKTG3000 Strategic Marketing Management Assessment Brief 2026 | UON
- AVET204 Animal Nutrition, Care & Behaviour Assignment Brief 2026 | TP
- NUR3506 Translation of Evidence into Practice Assessment 3, 2026 | NUS
- NUR3507 Clinical Practice Development Project Assignment Brief 2026 | NUS
- EGE202 Application Programming Assessment Project 2 2026 | Nanyang Polytechnic